,又稱汽車駕駛(shǐ)仿真,或汽(qì)車虛擬駕駛。模擬(nǐ)駕駛讓(ràng)體(tǐ)驗者在一(yī)個虛擬的駕駛環境中,使其感(gǎn)受接近真實效果的視覺、聽覺和體感(gǎn)的汽車駕駛體驗。
效果逼真、節能、安全、經(jīng)濟,不(bú)受時間、氣候、場地(dì)的限製,駕駛訓練效率高、培訓周(zhōu)期短(duǎn)等優(yōu)勢,在新車型開發和(hé)駕駛培訓方麵應用十分廣泛(fàn)。
虛擬現實係統,不僅(jǐn)可以模擬道路環境如各類建築、橋梁、隧道、水域、植被綠化等,還能模擬各種天氣環境如(rú)早(zǎo)晨、中(zhōng)午、黃(huáng)昏;大霧、下(xià)雨、下雪等。另外,虛擬現實係統(如中視典的VRP虛(xū)擬(nǐ)現實三維仿真平台)特有的高畫質渲染技術,也(yě)為三維數字汽車原型設計成(chéng)為(wéi)了可能,使得汽車具(jù)有非常逼真(zhēn)的外觀。
汽車動力(lì)學仿真物理係統,做為汽(qì)車運動仿真(zhēn)中最核心的環節,成為模擬(nǐ)駕駛中最(zuì)為關鍵的部分。可以模擬逼真的剛體動力學特性,如(rú)運動物體具(jù)有密度、質量、速度、加速度、旋轉角速度、衝量等各種(zhǒng)現實的物理動力學屬性。在發生碰撞、摩擦、受力的(de)運動模擬中,不同的動力學屬性能得到不同的運(yùn)動效果。(詳情請參照VRP-PHYSICS物理係統介紹)
六自由度運動平台是由六(liù)支油缸,上、下各六隻萬向鉸鏈和上、下兩個平台組成,下平台固定(dìng)在基礎上,借助六隻油缸的伸縮運動,完(wán)成上平台在空間六個自由度(X,Y,Z,α,β,γ)的(de)運(yùn)動,從而可以(yǐ)模擬出各種空間運動姿態(tài)。六自由度平台是各種(zhǒng)飛行及航海等領域操作模擬器的重要組成(chéng)部分,可由數字計(jì)算機實時控製提供俯仰、偏航、滾轉、升降、縱向和橫向平移的六自由度瞬時運動仿真。
多通道環幕(立體)投影係統是指采用多(duō)台投影機組合而成的多通道大屏幕展示係統,它比普通的標準投影係統具備更(gèng)大的顯示尺寸、更(gèng)寬的視野、更多的顯示內容、更高的(de)顯示分辨率,以及更具衝擊力和沉浸(jìn)感(gǎn)的(de)視覺效果。
舒適安全的座椅,仿真的方向盤、檔位(wèi)、油門和刹車,這些也是模擬駕駛係統必(bì)不(bú)可少的元件。中視典能夠(gòu)根據客(kè)戶需求,提供各種用戶輸入(rù)和座椅等配套硬件。
汽(qì)車駕駛模擬器 座艙由駕駛艙座,視景計算機,視屏(19寸顯示器),操作傳感器,數據采集卡,耳機和話(huà)筒等組成。
汽車駕駛模擬器座艙包含了與真實車輛相同的操作部件,"五大"操縱(zòng)機構:方向盤、離合器,腳刹,油(yóu)門和手刹。真車變速器:倒檔、一檔(dàng)、二檔、三檔、四檔、五檔和空擋(自動檔隻含前進檔、倒車檔和駐車檔)。真車操作開關:左轉向燈、右轉(zhuǎn)向燈、應急燈(dēng)、喇叭、點火開關、總電(diàn)開關、安(ān)全帶、車門、雨刷、遠光燈、近光燈、遠近光交(jiāo)替。
汽車駕駛模擬器座艙既可以進行聯網訓練,也可以進行單機訓練。利用主控台計算機,最多可以將30台座艙連接到一(yī)個訓(xùn)練場景(jǐng)進行訓練。
學員通過操作不同的操作部件,經過各(gè)自的(de)傳感器產生不同的操作信號,這些操(cāo)作信號通過數據采集卡(kǎ)傳(chuán)送給計算機,經過各種訓練模型的逼真運算,最後在視屏上輸出與操作相對應的三維場景與各種聲音(yīn)。
汽車駕駛模擬(nǐ)器軟件采用(yòng)最新三維(wéi)圖(tú)形生成技術,實現純三維界麵(miàn),集理論考試(科目一)、場地九項和樁考(科目二)、道路訓練(科目三)與一體。有以下特點:
(1)純三維選擇界麵。
(2)各種訓練天氣(qì),包括晴天、雨天(tiān)、霧天(tiān)、雪天(tiān)和(hé)黑夜。
(3)14種訓練車型,手動(dòng)擋、自動擋(dǎng)、小汽(qì)車、大貨車、大客車等。
(4)26種訓練場景,分別放置在基礎訓練、場地九項與樁考、道(dào)路訓練(liàn)中。
(5)FLASH動畫講解(jiě),即使教練不在,也知道如何訓練(liàn)。
(6)超過60條錯誤判別和語言(yán)提示,嚴格把關。
(7)豐富的軟件設置功能,個性化定義軟件
1 、軟件主界麵
駕(jià)駛員培訓設施軟件主界麵下圖所示,界麵(miàn)上有"基礎訓練"、"九項與倒庫"、"道(dào)路訓練"、"聯網駕駛"、"理論考試"、"教學錄像"、"軟件設置"、"駕駛回(huí)放"、"訓練記錄"、"傳感測試"、"標誌法規"、"退出(chū)訓練"。
2 、基礎訓練
如下圖所示,基(jī)礎(chǔ)訓練中(zhōng)包含"原(yuán)地駕(jià)駛/傳(chuán)感(gǎn)自檢","方形訓練場","百米換擋","大8字路","初級訓練場景","轉向訓練"。
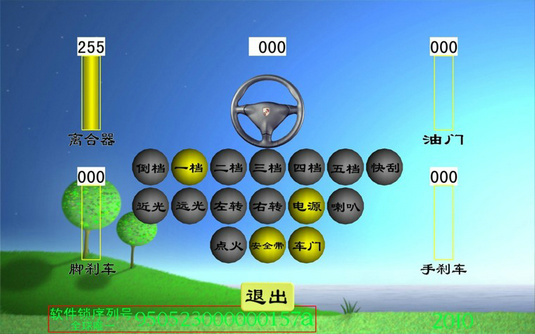
2.1 原(yuán)地(dì)駕駛/傳感自檢
如(rú)下圖所示(shì)為原地駕駛界麵,在原地駕駛/傳感測試中,可以測試所有的傳感器信號,同時也可以作為學員熟悉汽車操作部件的初級訓(xùn)練。在原地駕駛中,有方(fāng)向盤、離合器、油(yóu)門、腳刹車、手刹車、檔位、雨刮、前大燈、轉向燈、點火鑰匙、喇叭、安全帶和(hé)車門的傳感器(qì)信號顯示。
2.2 方(fāng)形訓練場
方形訓練場是一個四方的(de)訓練場景,可以進行半聯動訓練(liàn),即離合器(qì)踩到一半的位置。該(gāi)訓練場有5種天氣可供選擇,有白天、雨天、黑夜、霧天(tiān)和雪天。
方形訓(xùn)練場(霧天)
方形訓練場(晴天)
方形訓練(liàn)場(黑夜)
方形訓練(liàn)場(雪天)
方(fāng)形訓練場(chǎng)(雨天)
2.3 百米換擋
在百米換擋中,設置了百米換擋場景(jǐng),學員可以在這(zhè)裏進行換擋訓練,一般來說,換擋訓練練習從1檔逐步換到5檔,然後(hòu)再逐(zhú)步(bù)從5檔換回2檔。
百米(mǐ)換擋(dǎng)(晴天)
百米換擋(黑夜(yè))

百米換擋(dǎng)(霧天)
百米換擋(雪天)

百米換擋(雨天)
2.4 大8字路
8字(zì)路對於學員聯係轉向技能有(yǒu)很大的幫助,但(dàn)是正常的8字路轉彎半徑較小,所以較難掌握。通過加大8字路的轉彎(wān)半徑,設置(zhì)一個大8字路場景,可以很好的訓練轉向技能。
大8字路(雨天)
大8字路(黑夜)
大8字路(晴天)
大(dà)8字路(霧天)
2.5 初級訓練場景
在初級訓練場景中(zhōng),設置了隧道、街道等場景(jǐng),場景中共(gòng)有其他車輛30輛。初(chū)級訓練場景(jǐng)可以選擇晴(qíng)天(tiān)、雨天、霧天、雪天和黑夜作為訓練天氣。
初級訓練場景(晴天)
初級訓練場景(黑夜)
初級訓練場景(霧天)
初級訓練場景(雪天)
初級訓練(liàn)場景(雨天)
2.6 轉向訓練(liàn)
在轉向訓練中,設置了連續直角彎、連續S彎,用於訓練學員的轉向能力。該場景隻有晴天可供訓練。
3、九項與倒庫
場地駕駛包括場地九項(xiàng)和倒庫,即"樁考","側方停車","坡道停車和(hé)起步","通過單邊橋","曲線行駛","直角轉彎","限速通過限寬門","連續(xù)通過障礙","百米加減檔","起伏路駕駛(shǐ)"。對於這10項訓(xùn)練內容,大車和小車有不(bú)同的訓練場景。所有的考核和評判嚴格按照公安部標準進(jìn)行。
進行場地訓練(liàn)時(shí),如果考試不合格,則係統自動將車(chē)輛(liàng)退回到起點位置,方便學員重新進行訓練和考(kǎo)試。
3.1 樁考(kǎo)
"樁考"考核機動車(chē)駕駛人操控(kòng)車(chē)輛完成側方(fāng)移位、倒車入庫和正確判斷車身空間位置的能力。
從起點倒入乙(yǐ)庫停正,再經過二(èr)進二退移位到甲庫停正,前(qián)進(jìn)穿(chuān)過乙庫至路上(shàng),倒入甲(jiǎ)庫(kù)停正,前進返回起點。
評判及提示語有:倒(dǎo)樁考試開始,倒樁考試結束,不按(àn)規定路(lù)線、順(shùn)序行駛,碰擦樁杆,車身出線,移庫不入,中途熄火,中途調(diào)整車身位置。
3.2側方停車
"側方停車"讓駕駛(shǐ)員掌握將整(zhěng)車正確停於路右(yòu)車位(庫)中的技能,以適應日常駕駛生活中臨(lín)時停車的需要。
駕駛人員駕駛車輛在不碰(pèng),擦庫位(wèi)樁杆,車(chē)輪不壓碰車道邊線,庫位邊線的情況下,通過一進一退,將整車移入右側車庫位中。
評(píng)判及(jí)提示語有:側方停車考試開始,側方停車(chē)考試(shì)結束,車輛在入庫後車身(shēn)出線,碰擦樁杆,行駛中輪胎觸軋車道(dào)邊線,中途調整車身位置。
3.3坡道停車和起步
考核機動車(chē)駕(jià)駛人在坡道上駕駛車輛的(de)技能,準確判斷車輛的位(wèi)置,正確使用(yòng)製動、擋位和離合(hé)器,以適應在上(shàng)坡路段(duàn)停(tíng)車與起步的需要。核駕駛員上坡路的駕禦車輛(liàng)的(de)能力,正確的固定地點(diǎn)靠邊停穩車(chē)輛的(de)能(néng)力,以準確(què)適用檔位(wèi)和(hé)離合器的能力,以適應在上坡路段等候放行時的操作(zuò)需要。
機動車駕駛人應通過視覺和感覺及時判斷坡道的坡度大小(xiǎo)、長短及路寬等道路情況,采取正確的操作方法,控製車輛平穩停車和起(qǐ)步。做到轉向(xiàng)正確,換(huàn)擋(dǎng)迅(xùn)速,操縱加速踏板、駐車(chē)製動器和離合器(qì)踏板的動作準確協調。
評判及(jí)提示語有:"坡道定點停車和起(qǐ)步"考試開始,"坡道定點(diǎn)停(tíng)車和起步"考試結束,車輛(liàng)停止後,汽車前保險杠(gàng)距(jù)離樁杆線超過50厘米,車輛保險杠未停於樁杆線(xiàn)上,前後超過 20厘米,不超過 50厘米,車輛停(tíng)止後,車身(shēn)距離路邊緣線(xiàn)30厘米(mǐ)以上,起步時後溜大於30厘米,起步時後溜小於30厘米。
3.4 通過單邊橋
考核機動車駕駛人員對所駕駛的車輛能準確運用方(fāng)向,並對(duì)所有車(chē)輪位置的(de)直線行(háng)駛軌跡(jì)的正確判斷和掌握(wò)車輛不平行運行技術。
駕(jià)駛員要正確掌握方向,將甲、乙兩橋分(fèn)別用左、右邊(biān)輪壓於輪(lún)下,平穩順暢通過,用一檔(dàng)(含)以上檔位。(單側前後車輪一(yī)次(cì)通過左、右(yòu)單(dān)邊橋(qiáo)。)
評判及提示語有(yǒu):"通過單邊橋"考試開始,"通過單邊橋"考試結束,有一車輪未上橋,行駛中出現一個車輪掉下橋麵,未通過單邊橋。
3.5曲線行駛
考核駕駛遠方向的運(yùn)用(yòng)與對車輛(liàng)軌跡運行的掌握。
機動車駕駛人駕駛車輛(liàng)從彎道的一端前進駛入,減速換擋,以低擋(dǎng)低速從另一(yī)端駛出。行駛中不得軋彎道(dào)邊緣線(xiàn),轉向自如(rú)。
評判及提示語有:"曲線行駛"考試開始,"曲線行駛"考試結束,車輪(lún)駛出邊緣線,車(chē)輪壓路邊緣線,中途調整車身位置。
3.6直角(jiǎo)轉彎
考核駕駛員急彎路段迅速運用方向對車輛內輪差距進行正確判斷。
機動車駕駛人駕駛車輛按規定(dìng)的(de)線路低速(sù)行駛,由左向右或者由右向(xiàng)左直角(jiǎo)轉彎,一次通過,中途不得停車。
評(píng)判(pàn)及提示語有: "直角轉彎"考(kǎo)試開始,"直角轉彎"考試結束,車輪觸軋突出點或者駛出邊緣線,中途調整車身位置,車輪觸(chù)軋道路邊緣線,借助倒車完成。
3.7限速通過限寬門
考核駕駛員在一定的(de)車(chē)速下對車身(shēn)位置的正確判斷能力。
機動車駕駛人駕駛(shǐ)車輛以不低於20公裏/小時的速度,從三門(mén)之間穿越,不得碰擦懸杆。
評判及提示語有:"限速通過限寬門(mén)" 考試開始,"限速通過限寬門" 考試結束,時速低於20公裏/小時(shí)通過,不按規(guī)定路(lù)線、順序行駛,碰擦限寬(kuān)門(mén)懸杆。
3.8連續通過障礙
考核機動車駕駛(shǐ)人駕駛車輛通過連續障礙時,對(duì)車(chē)輪行駛軌(guǐ)跡和內、外輪差的判斷能力。
除小型車輛用一擋外,其他車輛用二擋(含(hán))以上擋位,將車騎於圓餅之上通過,車輪不(bú)得碰、擦、軋(zhá)圓(yuán)餅,並且不得超、軋兩側路邊(biān)緣線。
評判及提示語有:"通過連續障礙"考試開始,"通過連續障礙"考試結束,不按規(guī)定路線行駛的(de),車輪駛出(chū)邊緣線,車(chē)輪壓(yā)路邊緣(yuán)線,壓圓餅(bǐng),碰、擦圓餅。
3.9百米加減檔
考核機動車駕(jià)駛人操縱車輛擋位的熟練程度。
機(jī)動(dòng)車(chē)駕駛人駕駛車輛由起點線起步,在百米內完成從最低擋逐級加至最高(gāo)擋,再從最高擋逐(zhú)級減至二擋。
評判及提示語有:"百米加減擋"考試開始,"百米加減擋"考試(shì)結束,未完成規定加、減擋,越級換擋。
3.10起伏路駕駛
考核(hé)駕駛員掌(zhǎng)握起伏(凹(āo)凸)路(lù)的(de)駕駛要領和對起伏(凹凸(tū))路麵進行正確判斷的能力(lì),並(bìng)做到製動、離合器、檔位三者配合適當。
車輛正常行駛在障礙物前 20 米 內製動減速,用(yòng)低(dī)檔(一(yī)檔)或使用半聯動通過,保證車輛平(píng)穩安全的通過障礙。
評判及提示(shì)語有:"起伏路駕駛"考試開始,"起伏路(lù)駕駛"考試結束,車速控製不當,車輛嚴重跳躍,通過起伏路前不(bú)減速,通過起伏路前過早減速。
4 、道路訓練
道路訓練中設置(zhì)了"城(chéng)市道路","高速公路","鄉村(cūn)道路","山區道路","海景公路","炫目駕駛","高速公路(經(jīng)典版)","一般道路(經典版)","山區(qū)道路(經典版)","8字路"。
4.1 城市道路
城市道路場景中設置了立交橋、十字路口、丁字路口、環形島、環城路、隧道等內容。城市道路中(zhōng),可以選(xuǎn)擇"無(wú)其他車輛","其他車輛較少","其他車(chē)輛(liàng)中等","其他車輛較多"。
如果選擇"無其(qí)他車輛(liàng)",則整個場景中沒有其他車輛;如果選擇"其他車輛較(jiào)少",則場景中車輛數量為40輛(liàng);如果選擇"其他(tā)車輛中等",則場景中車(chē)輛(liàng)數量為(wéi)80輛;如果選擇"其他(tā)車輛較多"則場景中(zhōng)有120輛各種車輛,並且有20個行人。
城市道路(lù)有"晴天","雨天","雪天","霧天"和"黑(hēi)夜"可供選(xuǎn)擇。
4.2 高速公路
場景中有收費站、超車(chē)道、行(háng)車道、出口等交通標誌牌,車距確認、隧道、高速公路(lù)出入口等內容。場景中有120輛其它車輛。
高速公路有"晴天","雨天","雪天","霧天"和"黑夜"可(kě)供選擇。
4.3 鄉村道路
鄉村道(dào)路是一個(gè)開放(fàng)的場景,場景(jǐng)中共有60輛其他車(chē)輛,並設置有鐵道路口等場景。
鄉村道路有"晴天","雨天","雪天","霧天"和"黑夜"可供選擇。
4.4 山區道路
山區道路(lù)中,設置了陡坡、急彎等場(chǎng)景,訓練學員在視(shì)線不好的情況下進行駕駛的技能。山區道路中有60輛其它車輛。
山區道路有"晴天","雨(yǔ)天(tiān)","雪天(tiān)","霧天(tiān)"和(hé)"黑夜"可供選擇。
4.5 海景公路
海景公(gōng)路(lù)設置為一個在海邊的場景,隻有晴天的天氣模式進行訓練。
4.6 炫目駕駛(經典版)
炫目駕駛是WM2011型汽(qì)車駕駛(shǐ)模擬(nǐ)器軟件(jiàn)中的一個場景,在WM2011型軟(ruǎn)件中取得了(le)較好的效果,因此稱之為(wéi)經典版。該場景(jǐng)主要用於(yú)訓練學員(yuán)在炫目(mù)下的駕駛適應能力。場景中有60輛其它車輛。
4.7 高速公路(經典版)
高(gāo)速公路(經典版)是WM2011型汽車駕駛模擬(nǐ)器軟件中的一(yī)個場(chǎng)景,因此稱之(zhī)為經典版。場景中有60輛其它車輛。
4.8 一般道路(經典版)
這(zhè)是WM2011型汽車駕駛模擬器(qì)軟件中的一(yī)個訓練(liàn)場景,所以稱之為經典版。
4.9 山區道路(經典(diǎn)版)
這是WM2011型駕駛模擬器軟(ruǎn)件中的一個場景,故稱之為經典版。場景中(zhōng)有30輛其(qí)它車輛。
4.10 "8"字路
這是專門用於(yú)訓練(liàn)學員轉(zhuǎn)向能力(lì)的一個場(chǎng)景,場景中彎道的半徑較小。
5 天氣(qì)選擇
天氣選擇包括:白天,雨天,雪天,霧(wù)天和黑夜。下(xià)麵以山區道(dào)路為(wéi)例(lì),說明各種訓練天氣。
5.1 白天
下圖是山區道路中(zhōng)的白天訓練天氣。
5.2 雨天
下圖是(shì)山區(qū)道路中(zhōng)的雨天(tiān)訓(xùn)練天氣。
5.3 雪天
下圖是山區道路中的雪天訓練天氣(qì)。
5.4 霧天
下圖是山區道路(lù)霧(wù)天。
5.5 黑夜
下圖是山區道(dào)路黑夜。
6、 訓練車(chē)型選擇
下圖(tú)是訓練車型(xíng)選擇,訓練車型包括:手動擋(dǎng)小汽車,手動擋大貨(huò)車(chē),手動擋吉(jí)普車,手動擋(dǎng)大客(kè)車,自動檔小汽車,自動檔(dàng)吉普(pǔ)車,手動擋小汽車等14種訓練車型。
7 、聯網駕駛
7.1 監控聯網
如下圖所示,監控聯網中,主控台可以連接56台駕駛艙進入(rù)。與互見聯網不同的是,監控聯網的主控(kòng)台(tái)上隻能監控(kòng)駕駛艙中的實時畫麵,但(dàn)是駕駛艙之間互相看不見。
7.2 互見聯網(wǎng)
下圖為網絡互見聯網程序,通(tōng)過下麵的程(chéng)序,可以實現56台駕駛艙在同一個場景中(zhōng)駕駛,駕駛在同一個(gè)場景中的車輛互相可以聽見其他(tā)車輛喇(lǎ)叭,看見其他車輛刹車燈,轉向燈等。互(hù)見聯網(wǎng)模式隻有3個場景可供選(xuǎn)擇,分別是城市(shì)道路,高(gāo)速公路和(hé)山區道路。
對(duì)應與(yǔ)互見聯(lián)網的駕駛艙界麵如下(xià):
當主控台城固點擊"允許連接"後,駕駛艙點擊"聯(lián)網駕駛",則連接到服務器。等所有的駕駛(shǐ)艙都連接到主控台後,主控台程序(xù)上點擊"開(kāi)始訓練",則所有的駕駛艙開始(shǐ)加載數據,並(bìng)進入場景中,車(chē)輛互相可見。點擊"結束訓練"則所有的駕駛艙退出(chū)聯網訓(xùn)練(liàn),返回到主界(jiè)麵。
8、其他功能
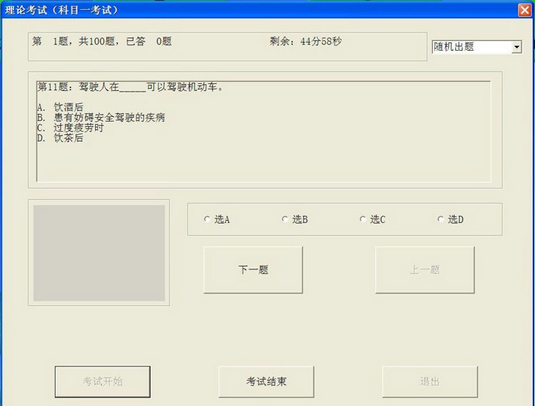
8.1 理論考試
理論考試中總共包含1500道題目,可以進(jìn)行隨機抽取100道題目進行考試(shì),也可以按照(zhào)順序出題,例如1~100,101~200,201~300等。
考試時間最長為45分鍾,考試完成後點擊(jī)考試結束,則係統自動進行評分。另外考試結束後可以查看每一道題目的答案。
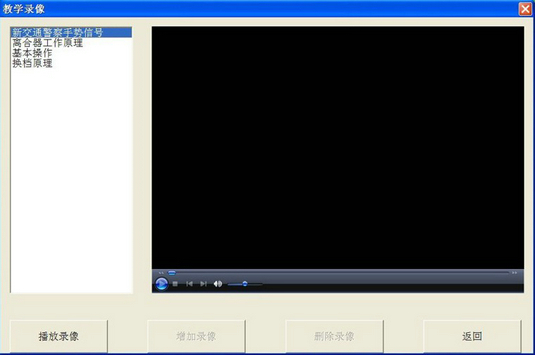
8.2 教學錄像
在主界麵(miàn)中(zhōng)點擊"教學錄像",則(zé)進(jìn)入(rù)如下界麵中。這(zhè)裏可以播放已(yǐ)經(jīng)設置好的錄(lù)像。增加和刪(shān)除錄像需要在軟件設置(zhì)中(zhōng)完成,這裏不能進行增(zēng)加和刪除操作。
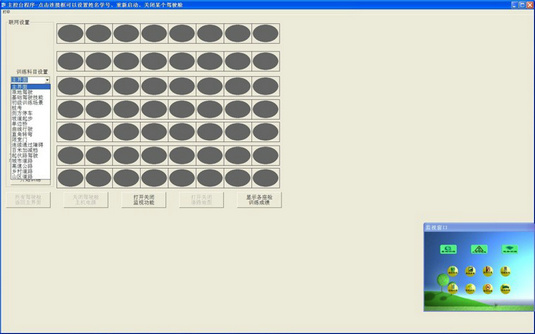
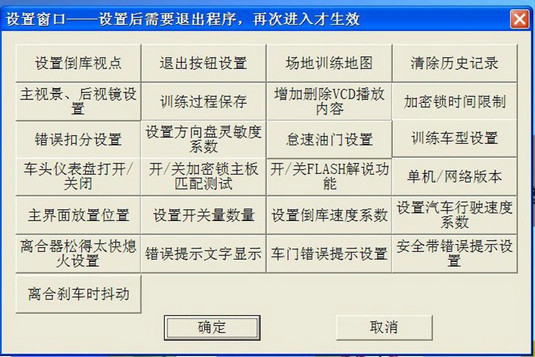
8.3 軟件設置
為了防止用戶對軟(ruǎn)件隨意進(jìn)行設置,進入軟件(jiàn)設置首先需要輸入(rù)密碼。
在設置界麵(miàn),可以進行設置的內容有:"設置倒庫視點(diǎn)","退出按鈕設置","場地訓練地圖","清(qīng)除曆史記錄","主視景、後視鏡設置","訓練過程保存","增加刪(shān)除VCD播放內容","加密鎖時間(jiān)限製","錯誤扣分設置","方向盤靈敏度(dù)係數","怠速油門設置","訓練車型設(shè)置","車頭儀表盤打開/關閉","開(kāi)/關加密鎖主板匹配測試","開/關FLASH解說功能","單機/網絡(luò)版本(běn)","主(zhǔ)界麵放置位置","設置開關量數量(liàng)","設置倒庫速度係數","設置汽車行駛速度係數","離合器鬆得太快熄火設置","錯誤提示文字顯示","車(chē)門錯誤提示設置","安(ān)全帶錯誤提示設置","離(lí)合刹車時抖動(dòng)"。
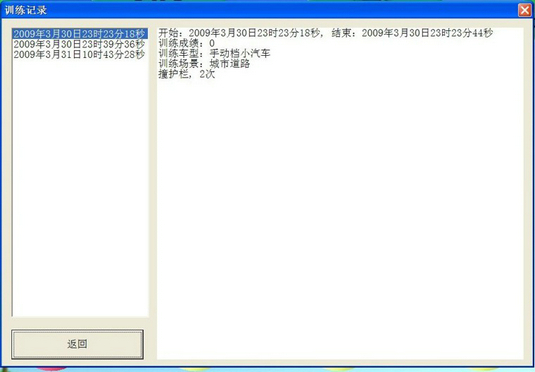
8.4 訓練記錄
在每次(cì)訓練結束(shù)後,退出到主界麵之前,都會出現如(rú)下界麵,如果點擊"保存記錄",則從主界麵進入的訓練記錄中,就可以看到(dào)相應的訓練(liàn)記錄保存下來(lái)。
8.5 傳感測試
在(zài)傳感(gǎn)測試(shì)中,可以測試傳感器的原始讀數,並對傳感器讀數(shù)進行標定。
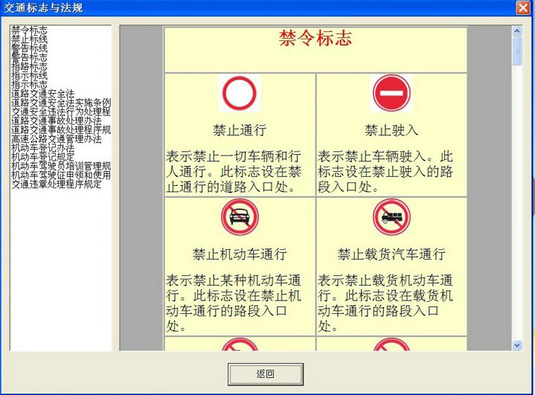
8.6 標(biāo)誌法規
在標誌法規中,有"禁令標誌","禁止標線","警告標誌","指路標誌","指示(shì)標線","指示標誌","道(dào)路交通安全法","道路交通安全實施條例"等



































 品牌理念(niàn)
品牌理念(niàn)  標準(zhǔn)流程
標準(zhǔn)流程  有效溝通
有效溝通 專業管理(lǐ)
專業管理(lǐ) 優秀團隊
優秀團隊 品質保證
品質保證 無憂售(shòu)後(hòu)
無憂售(shòu)後(hòu) 