設為首頁
|
收藏本站(zhàn)
|
聯係我(wǒ)們
網站首頁
企業概況
新聞(wén)動(dòng)態
產品介紹
產品導航
行業標準
技(jì)術文(wén)章(zhāng)
配置方案
技(jì)能大(dà)賽
成功案例(lì)
企(qǐ)業博客(kè)
售後服務
聯係我們
維修電工實訓設備
高級(jí)技師電工實訓設備(bèi)
網孔板電工電(diàn)子實訓設備
工業自動化實訓設備
PLC可編程實訓設備(bèi)
電機實訓設備
高性能電工電子實驗設備
工廠電氣(qì)控製實訓(xùn)設(shè)備
單片機實訓設備
計算機原理實(shí)訓設備
電工電子實訓設備(bèi)
立式電工電子實訓考核設備
模(mó)電數電(diàn)實訓設備
電子(zǐ)實訓設備
櫃式電工電拖(tuō)實訓設備
數電模(mó)電實驗箱
光(guāng)機電一體化(huà)實訓設備
傳感器實訓設備(bèi)
家用電器實訓設備(bèi)
電梯實訓設備
光伏發電實訓室設備
機械陳列櫃
機械創新實訓設(shè)備
液壓傳動實訓設備
煤礦安(ān)全培訓技能實訓設備
環境工程實訓設備
化工工程實訓設備
化工原理實訓設備
流體力學實訓設備
新能源實訓設備
過程控製實訓設備(bèi)
鉗工(gōng)實驗室設備
工(gōng)程製圖實驗室設(shè)備
熱工實訓設備
教學數控車床銑(xǐ)床實訓設備
采暖通風實訓設備
機床電氣實(shí)訓(xùn)裝(zhuāng)置
數控維修實訓室設備
透明注(zhù)塑機模型
樓(lóu)宇實訓設備
汽車底盤(pán)實訓室設備
物業管理實訓室設備
汽車駕駛模擬器
汽車發動機實訓設備
汽車發動機拆裝台實(shí)訓設備(bèi)
汽車空調係統實訓設備
汽車(chē)全車電器實驗台
汽(qì)車變速器實訓設備(bèi)
暖通空調(diào)實訓室設備
汽車解剖模型
製冷製熱實訓設備
消防實訓室設備
汽車示(shì)教板
新能源(yuán)汽車實(shí)訓設備
新(xīn)能源汽車電池實訓室設備
部隊.軍校實訓設備(bèi)
船(chuán)舶工程實訓(xùn)室設備
教學模型
汽車電(diàn)路接(jiē)線實訓設備
心肺複蘇模擬人
風力發電實訓(xùn)設備
新能源汽車電機驅動實訓室
汽(qì)車電子實驗箱
環境實驗室實驗(yàn)設備
給排水(shuǐ)工程處理實驗室設備
工程機械實驗設備(bèi)
工業機器人應(yīng)用(yòng)實訓室設備
農機工程機械(xiè)實(shí)訓設備
主(zhǔ)頁
>
新聞動態(tài)
>
電機(jī)裝配與運行檢測技能(néng)教學分(fèn)析
2021-11-26
電機(jī)裝配與運行(háng)檢測技能教學(xué)分析
電機裝配與運行檢測賽(sài)項(各組別)有(yǒu)統一的參賽要求,選手要在規定時間內,根據競賽時發給的工作任(rèn)務書,完成電機的選型與繞組檢測、線(xiàn)路安裝、驅動器參(cān)數的設置、運行性能參數(shù)測量等任務,並按工作任務書的要求編寫PLC 控製程序和觸摸屏監控(kòng)界麵(miàn)。
該項(xiàng)目的比賽時間是(shì)四個小時,在四個小(xiǎo)時的比賽時間裏,參賽選手要完成這麽多的任務(wù),確實不容易。每(měi)個選手即使精神飽滿(mǎn),積(jī)極投入,但也都麵臨著時間緊、任務重的實際情況。比賽時爭分奪(duó)秒,精心操作自然是不必說的,但是比賽中仍出現選手來不及(jí)編程、來不及測參數等問題現狀,也因此沒(méi)能取到好成績,無(wú)緣獎(jiǎng)牌。
比賽時間大家都是一樣的(de),能讓各電動機按要求(qiú)運轉起來是硬道理,每一個選手比的不僅是技術(shù)水平更是速度和(hé)效率。如何在教學(xué)中幫助學生在每一步操作(zuò)上提高效率呢?除了從熟悉操作流程,減少誤操作上提高效率,優化PLC 編程也是提高效率的關鍵,是一個值得探討的問(wèn)題。為了實現(xiàn)同一個任務由(yóu)於選用不同的指令和設計不(bú)同的編程思路可以編寫出來多個不同的程序,這些程(chéng)序的繁簡程度(dù)和用(yòng)時長短自然就大(dà)不一樣。在(zài)YUYDJ-01電機裝配技能實訓裝置技能教學中,我們進行了步進電機和三(sān)相異步電動機轉速控製的PLC 編程的優化,以提高編程效率。“電機的控製”是《電機技術與應用(yòng)》課程裏的內容,電氣與自動化專業的學生在職高二年級的時候已經學過。其教學目標是,學生通過(guò)學習能夠正(zhèng)確理解電機的(de)工作過程,並掌握三菱FX3u-32M 係列PLC 指令(lìng)及編程,不僅學過ADDP 加法(fǎ)指令、SUBP 減(jiǎn)法指令、MULP 乘法指令;還學過MOVP 數據傳送指令、ZRST 區間複位(wèi)指令、PLSY:16 位連續執(zhí)行型脈衝(chōng)輸出指令等。下麵例舉兩台(tái)電動機優(yōu)化後的編程實例。
一、步進電機(jī)的轉速控製PLC編程
1.設計要求:
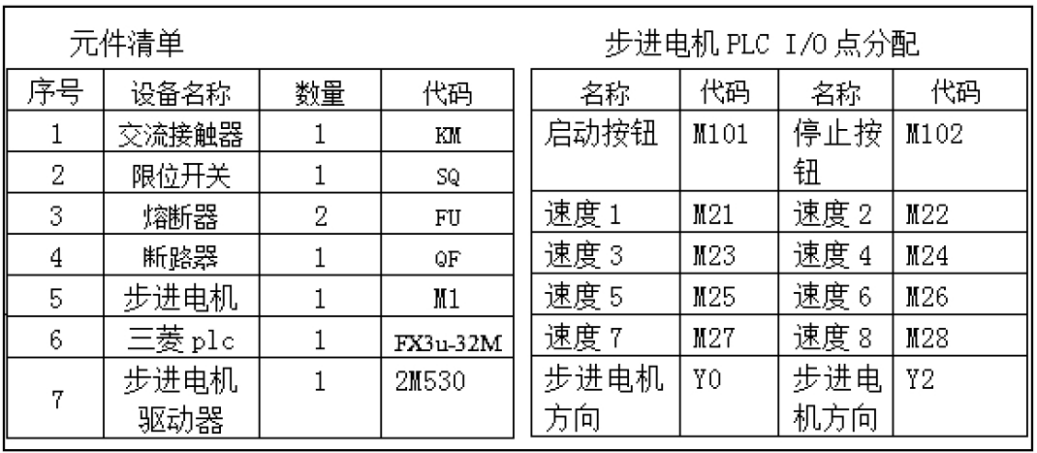
係統有(yǒu)8 種速(sù)度可以選擇。步進電機在(zài)靜(jìng)止不動且KM1 不吸合時(shí)為係統處於原點(或稱初始狀態)。當按下(xià)啟動按鈕時KM1吸合、電動機不轉隻有再按下速(sù)度選擇(zé)按鈕電動機才會根(gēn)據所選擇的速度轉動。(速度1 為90r/min、速度2 為120r/min、速度(dù)3 為150r/min、速度4 為180r/min、速度5 為210r/min、速度6為(wéi)240r/min、速度7 為270r/min、速(sù)度8 為300r/min、)。當按下停止按鈕KM1 釋放電動機停止轉動。再(zài)一次按下(xià)啟動(dòng)按鈕時KM1 吸合、電動機不轉(zhuǎn)隻有再按(àn)下速度選擇按鈕電動機才會根據所選擇的速度(dù)轉動。(可以進行循環)
2.設計(jì)目標:
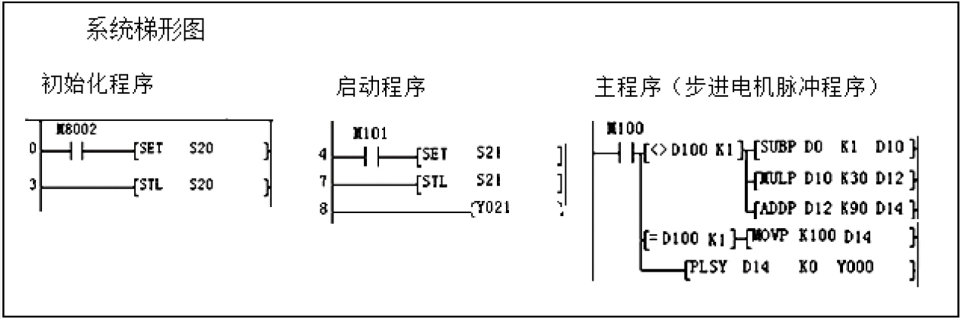
用四則邏輯運算指令(加減乘除)編程。並總結出這種方法編程方法的特點。
3.實踐任務與要求:
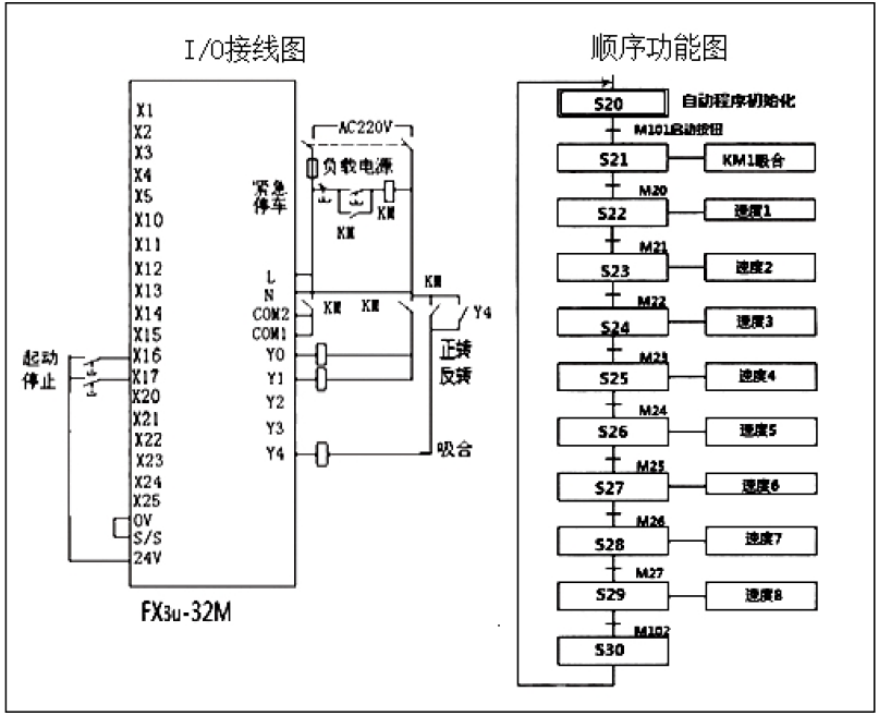
根據設備工藝要求,製定合理的改造方案;確定輸入、輸(shū)出設備,正確(què)選用(yòng)PLC;正(zhèng)確計算選擇電(diàn)器(qì)元件(jiàn),列出電器元件(jiàn)一覽表(biǎo);PLC I/O 地址分配,並繪製I/O 接線圖;設計梯形圖並模擬調試(shì)。
梯形圖工作過程(chéng)分析: 該係統的(de)初始化(huà)程序用來設置初始狀態和原點位置條件。當係統回到S20(係統初始位時),這時按下啟動按鈕(M101)就執行下一步S21,在S21步中交流繼電(diàn)器KM1 吸合,在S21 步中按下速度1(這裏的速度1 就是觸摸屏中的D100,Set-Value D100 是(shì)按一下自動加一)D100 等(děng)於1 的(de)時候步進電機以速度1 的(de)方式轉動,D100 等於2 的時候步進電(diàn)機以速度(dù)2 的方式轉(zhuǎn)動,D100等於3 的時候步進電機以速度3 的方式轉動,當D100 等於(yú)9 的時候(hòu)D100 自動還回到D100 等(děng)於1 的狀態。在S2 中(zhōng)KM1 斷開(複(fù)掉KM1)同時返回到S20 步進行循環。同時在S21 步中(zhōng)按下(xià)M102( 停止) 返(fǎn)回到S20 步中。
二、三相異步電動(dòng)機轉速(sù)控製PLC編程
1.設計要求:
係統有8 種(zhǒng)速(sù)度可以選(xuǎn)擇。步進電機(jī)在靜止不動(dòng)且KM1 不吸合時(shí)為係統處(chù)於原點(diǎn)(或稱初始狀態)。速度1(5HZ)、速度2(10HZ)、速度3(15HZ)、速度4(20HZ)、速(sù)度(dù)5(25HZ)、速度6(30HZ)、速度7(35HZ)、速度8(40HZ)。
當按下停止按鈕KM1 釋放電動機停止轉動(dòng)。再一次按下啟動按鈕時KM1 吸合、電動機不轉隻有再按下速度選(xuǎn)擇按鈕時(shí)電動機才會根據你選擇的速度轉動。(可以進行循環)
2.設計目標:
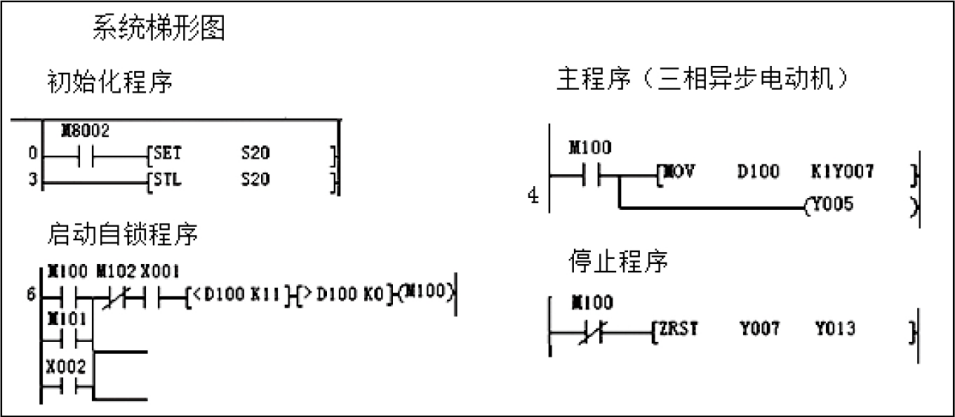
用特殊的運算指令(MOV 指令)編程,並總結出這種方法編程方法的特點。
3.實踐任務與要求:
根據(jù)設備工藝要求,製定合理的改造方案;確定輸入(rù)、輸出設備,正確選(xuǎn)用PLC;正確計算(suàn)選擇電器元件(jiàn),列出電器元件一覽表;PLC I/O 地(dì)址分配,並繪製I/O 接(jiē)線圖;設計梯形圖並模擬調試。
4.元件清單、PLC I/O點分配、I/O接線圖、順序功能圖(同上)。
梯形圖工作過程分析: 該係統的初始化程序用來設置(zhì)初(chū)始狀態和原點位置條件(jiàn)。當係統回到S20(係統初始位時),這時按下啟動(dòng)按鈕(M101)就執行下一步S21,在S21 步中交(jiāo)流(liú)繼電(diàn)器(qì)KM1吸合(hé)(這裏的KM1 以一種置位的方式運行下去),當按下按鈕M21 時執(zhí)行到S22 步中,在S22 中電機以速度1 的(de)形式轉動。當按下按(àn)鈕M22 時執行到S23 步中(zhōng),在S23 中電機以速度2 的形式轉動。當按下按鈕M23 時執行到S24 步中,在S24 中電機以速度3 的形式轉動。當按(àn)下按鈕M24 時(shí)執行到S25 步中,在S25 中電機以速度4 的形式轉動(dòng)。當(dāng)按下按鈕M25 時執行到S26 步中,在S26 中電機以速度5 的形式轉動(dòng)。當按(àn)下按鈕M26 時執行到S27步中,在S27 中電機(jī)以速度6 的形式轉動。當按下按鈕M27 時執行(háng)到S28 步中,在S28 中電機以速度7 的形式轉動。當按下按鈕M28 時執行到S29 步中,在S29 中電機以速度8 的形式轉動(dòng)。當按下按鈕M102 時執行到S29 步中,在S29 中KM1 斷(duàn)開(覆蓋掉KM1)同時返回到S20 步進行(háng)循環。
三、教學效果分析
步進電動機和三相異(yì)步電動機的兩個案例的分析結果如下表(biǎo)格:
從表格中可以看出,選用(yòng)普通指令編程用時較長,內容繁瑣,且(qiě)編完(wán)後由於程序太多不易在監控狀態全屏操作,監控時要用鼠標來(lái)回上下移動進行監控,麻煩又浪費時間。而選用特殊(shū)指令編程,從編程(chéng)步數、編程用時(shí)上,都得(dé)到了大大的縮減了,達到了優化的目的,提高工(gōng)作(zuò)效率。從編程程序上看也是簡單明了,出錯率降低,即使出錯也(yě)容易檢出,編程過程中不需(xū)要重複(fù)插入新的行,所用指令大大減少。從程序所配套的觸摸屏上來說,其設置也比較簡單,不需要重複的設置參(cān)數。因而在今後的技能實踐中,要取得更(gèng)好的教學(xué)效果和比賽成績,優化程序,提高編程效率尤為重要(yào)。
上一篇:
家電維修及專業原理、前景的(de)介紹及分析
下一篇:
製冷設備管路(lù)維修技巧應注意的(de)事項與方法
我們的優勢:
品牌(pái)理念(niàn)
標準流程
有效溝通
專業管理
客戶視圖(tú)
優秀團隊
品質保(bǎo)證
無憂售後
上海红桃视频app科教設(shè)備(bèi)有(yǒu)限公司,立於上海,心懷天下
生產基地:上海(hǎi)鬆江葉榭工業園
業務電話:021-56311657 , 56411696 , 業務傳真:021-56411696 公司郵箱(xiāng):shanghaimaoyu@126.com
教學設備廠
滬公網安備 31010702001294 號
滬ICP備13020377號-1
网站地图
红桃视频app-17c起草红桃国际-星空无限传媒红桃视频-红桃影视tvapp免费下载



 品牌(pái)理念(niàn)
品牌(pái)理念(niàn)  標準流程
標準流程  有效溝通
有效溝通 專業管理
專業管理 優秀團隊
優秀團隊 品質保(bǎo)證
品質保(bǎo)證 無憂售後
無憂售後 