光(guāng)機電一體實(shí)訓台組成與工作原理及部件的動作流程及程序設計思路
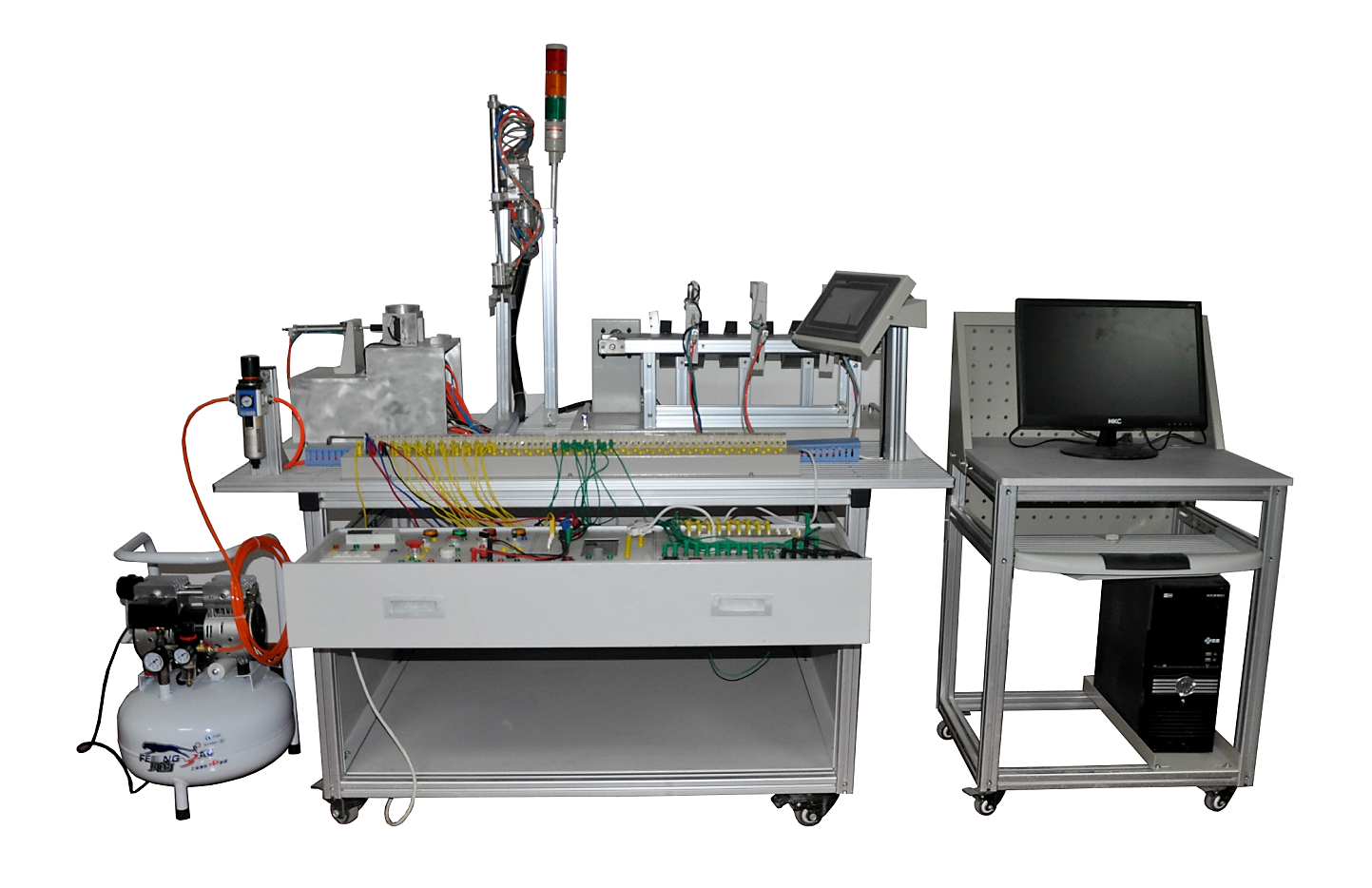
光機電一體(tǐ)實訓台是在培養從事機電(diàn)一體化設備的使用、維護、維修、設備的管理與設計等工作的高素質、高技能、應用型(xíng)高級職業技術人才。是根據職業教育(yù)培訓教材編寫《機電一體化專(zhuān)業》相關的技能培訓要求(qiú)而研製的,結合當(dāng)前(qián)工業自動化(huà)應用技術及器件技術的發展,充分考(kǎo)慮實用性、先進性(xìng)。根據任務(wù)引領式行為導向教學法,以重點培(péi)養學生的動手實(shí)操能力,團隊協作能力,創新能力。光機電一體實訓裝置由鋁(lǚ)合金導軌式實訓台、典型的機電一體化設(shè)備的機械部件、PLC模塊、變頻器模(mó)塊、步進電機(或伺服電機)模(mó)塊(kuài)、按鈕模塊、電(diàn)源模塊、模擬生產設備實訓模塊、接線端子排和各種傳感器、計算機等組成。同時還要求具有可拓展(zhǎn)功能,可以組成更加大型的生產模擬係統,以配合各個學校不同層(céng)次,不同專(zhuān)業的教學及培訓要求。
一、光(guāng)機電一體實訓台的組成及工作原理
實訓(xùn)裝(zhuāng)置台架為鋁合金導軌式,實訓考核裝置PLC模塊的I/O 端子、變頻器的接線端子、各常用模塊與PLC的連接端子,均與接線端子連接(jiē),各指令開關、光電開關、傳(chuán)感器和指示(shì)元(yuán)件的電路,則通(tōng)過(guò)端子排進行連接。既保證學(xué)生基本技能的訓練、形成和鞏固,又保證電(diàn)路連接的快速、安全和可靠。
1.鋁合(hé)金導軌式(shì)實訓台:可以安裝送料(liào)機構、機械手、傳輸分揀(jiǎn)機構。實訓模塊及PLC主機等可以放置在拉出式的底座上。
2.觸摸屏:MCGS7062 7寸真彩色觸摸屏。
3.PLC模塊及變頻(pín)器模塊:三菱PLC 40點以上(shàng)IO;變頻器不小於0.4kw;
4.電源模塊:三相電源總開關(帶漏電和短路保護)1個,單相電源插座(zuò)2個;按鈕模塊:24 V/6 A、5 V/2 A各一組;急停按(àn)鈕1隻,轉換(huàn)開關1隻1,按(àn)鈕黃、綠各1隻;
5.雙井式上料機構:井式工件庫2件,物料推出機構2件(jiàn),光電傳感器2隻,磁(cí)性開關2隻,單缸氣缸2隻,單控電磁閥2隻,警示(shì)燈1隻(zhī),主要完(wán)成將工件庫中的工件依次推出。
6.氣動機械手裝置:四自由度(dù)氣動(dòng)機械手,氣缸及附(fù)屬傳感器選用SMC;整個搬運機(jī)構能完(wán)成四個(gè)自由度動作,手臂伸縮、手臂運動、手爪(zhǎo)上下、手爪鬆緊。
7.物料分揀裝置:傳送帶通過(guò)三相異步電動機(jī)驅動,在傳送帶(dài)中間裝有兩個(gè)出料槽,對應位置有電感傳感器、紅外傳感器等,同時正對料槽位置裝有推料氣缸,共計兩個氣缸。傳送帶(dài)采(cǎi)用可拆卸的鋁(lǚ)合金支架。
二、光機電一體實(shí)訓台各部件的動作流程及程序設計思路
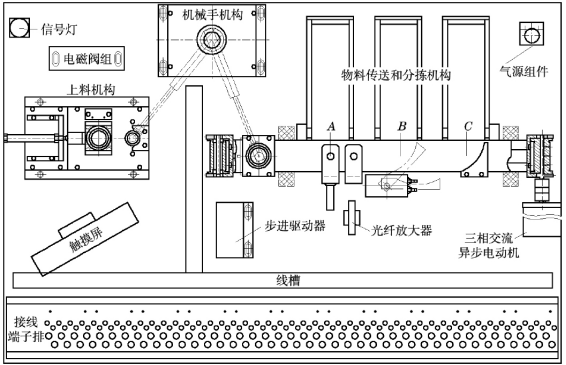
設備部件名稱和位(wèi)置。
設備部(bù)件名稱和位(wèi)置(zhì)
1.動(dòng)作流程
上(shàng)料機構推料(liào)氣缸(gāng)將零件(金屬零件、黑色尼龍零件和白色(sè)尼龍零件隨機提供)推到存放料台;機械手將零件從存放料台搬運至物料傳送機構並經傳送帶(dài)入料口到輸送線上,隻有當傳送帶(dài)上的零件被送(sòng)入料槽後,機械手才可以從入料口放入下一個零件。上料機構料筒內沒有(yǒu)零件時,黃(huáng)色信號(hào)燈長亮,設備暫停,放入零件後自動啟(qǐ)動。
在輸送(sòng)線上的零件由相應位(wèi)置的推料或導料裝置,經出料(liào)槽(cáo)分送到零件組裝機構進行組裝,相(xiàng)應位置的推料或導料裝置將零件送入料槽後回原位。
2.零件分(fèn)送要求
在位置A對應的出料槽分送到組裝機構的零件必須滿足是由第一個是(shì)金屬(shǔ)零件,第二(èr)個白色尼(ní)龍零件,第三個是(shì)金屬零件排列成的套件。在(zài)位置B對應的出料槽分送到組裝機構的零件必須滿足是由1個白色尼龍零件和2個黑色尼(ní)龍零件組合成的套(tào)件。同時滿足位置A對應的出料槽和位(wèi)置B對應(yīng)的出(chū)料(liào)槽要求的零(líng)件,應(yīng)優先經位置A對應的出料槽分送到組裝機構。
不滿足組合和排列關係的零件應導入位置C對應的出料槽(cáo)。皮帶輸送線由位置A向位置C方向送零件時,三相交流異步電動(dòng)機以35Hz的頻率帶動皮帶輸送機運行;皮帶(dài)輸送機由位置C向位置A方向(xiàng)送零(líng)件時(shí),三相交流異步電(diàn)動機以25Hz的頻率帶動皮帶(dài)輸送機運行。零件(jiàn)到達推出位置或被導入(rù)相應的料槽(cáo)後,皮帶輸送機停止運行。依據動作流程分配的PLC對(duì)應I/O口見表1。
|
序號 |
內容 |
輸入 |
內容 |
輸出 |
|
1 |
急停開關 |
X000 |
機械手步進電機啟動(PUL) |
Y000 |
|
2 |
運行測試按鈕SB4 |
X001 |
機械手(shǒu)步進電機方向(DIR) |
Y001 |
|
3 |
送料氣缸推出到位 |
X002 |
機械(xiè)手步進電機使能(ENA) |
Y002 |
|
4 |
送料(liào)氣缸縮回到位 |
X003 |
|
Y003 |
|
5 |
機械手(shǒu)步進電(diàn)機原(yuán)點 |
X004 |
綠(lǜ)色信號燈1Hz |
Y004 |
|
6 |
機(jī)械手步進電(diàn)機位置檢測 |
X005 |
綠(lǜ)色信(xìn)號燈2Hz |
Y005 |
|
7 |
臂伸縮氣缸伸出到位 |
X006 |
黃色信(xìn)號燈常亮 |
Y006 |
|
8 |
臂伸縮氣缸縮回到位 |
X007 |
送料氣缸推出 |
Y007 |
|
9 |
前臂升降氣缸下降(jiàng)到位 |
X010 |
臂(bì)伸縮氣缸伸出 |
Y010 |
|
10 |
前臂升降氣缸縮(suō)回到位 |
X011 |
前臂升降氣缸下降 |
Y011 |
|
11 |
氣動機械手(shǒu)爪夾緊到位 |
X012 |
氣動手爪夾緊 |
Y012 |
|
12 |
推料氣缸推出到位 |
X013 |
氣動手爪放鬆 |
Y013 |
|
13 |
推(tuī)料氣缸(gāng)縮回到位 |
X014 |
電機正傳(A料槽向C料槽) |
Y014 |
|
14 |
旋轉氣缸旋轉到位 |
X015 |
電機反傳(C料槽向A料(liào)槽) |
Y015 |
|
15 |
旋轉氣缸返回(huí)到位 |
X016 |
異步(bù)電機旋轉頻率35Hz |
Y016 |
|
16 |
料筒有料檢測 |
X017 |
異(yì)步電(diàn)機旋轉頻(pín)率35Hz |
Y017 |
|
17 |
存放(fàng)台有料 |
X020 |
推料氣缸推出 |
Y020 |
|
18 |
輸送皮帶入(rù)料口有料 |
X021 |
旋轉氣缸旋轉 |
Y021 |
|
19 |
金屬檢測傳感器 |
X022 |
|
|
|
20 |
白色尼龍檢測傳感器 |
X023 |
|
|
|
21 |
分料(liào)槽進料檢測傳感器 |
X024 |
|
|
|
22 |
零件組裝工序啟動按鈕SB1 |
X025 |
|
|
|
23 |
啟(qǐ)動組裝工序按鈕SB5 |
X026 |
|
|
|
24 |
停止按鈕SB6 |
X027 |
|
|
表1 控製電路I/O分配表
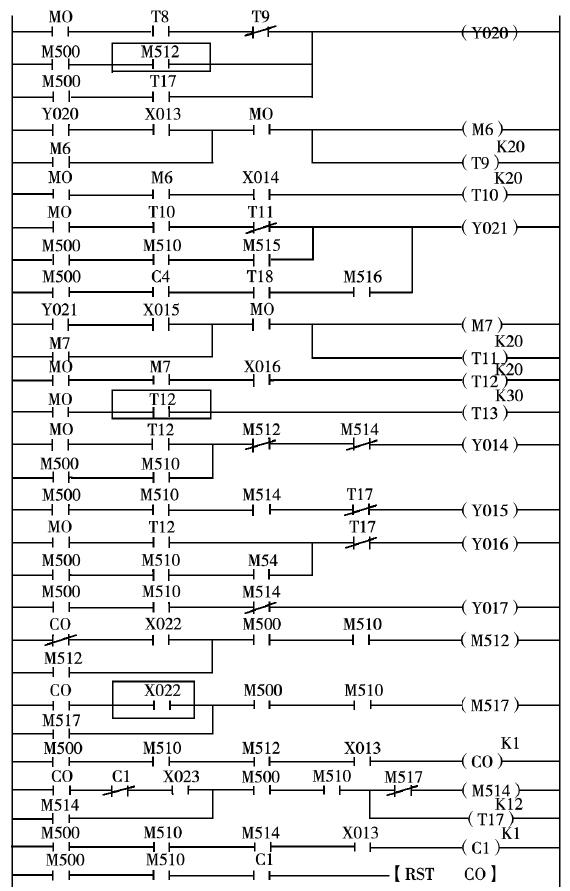
3.程序設計思路
根據PLC編程規則對本動作流(liú)程采取簡單的順序設計,分析動作要求轉化內容為:上料(liào)機構井式存(cún)料台內檢測開關檢測有料,且存放台無料(liào)的情況(kuàng)下,送料氣缸推出;送料氣缸推出到
位檢測開關有信號停頓1s,送料氣缸縮回。存放台物料到位後,機械手在原點(diǎn)信號到位,前臂升降氣缸(gāng)縮回信號到位,臂伸縮氣缸縮回到位信號到位,機(jī)械手爪(zhǎo)鬆開到位信號到位,臂伸縮氣缸伸出,前臂升降氣缸下降,待到位信號顯示正常,機械手進行抓取,抓取到位信號到位(wèi)。前臂升降氣(qì)缸縮回,臂伸縮氣缸縮回;前臂、伸縮氣缸(gāng)縮回到位信號到位。步進電機向右旋(xuán)轉(步進電機旋轉角度(dù)依靠步(bù)進(jìn)電機控製驅動器發出(chū)的脈衝數進行控製),步進電機(jī)旋轉(zhuǎn)到位信號到位,前臂、伸縮氣缸伸出(chū)、下降;檢(jiǎn)測輸送皮帶入(rù)料口無料,機械手爪鬆開,前臂、伸縮氣缸縮回到(dào)位(wèi)後,步進電機回歸原點(diǎn),等待下(xià)次循環。
出料槽完成分選(xuǎn),首先要自動識別黑色尼龍、白色尼龍、金屬鋁(lǚ)塊3種物料,金屬鋁塊可用提供的金屬傳感器進行檢測(cè),白色尼龍依靠光纖傳感器進行檢測,黑色尼龍(lóng)隻有靠排除法進行確認,即從皮帶入料槽(cáo)檢測有料輸送帶開始運行到出料槽B的時間內,檢測不(bú)是金屬物料又不是白色物料即(jí)為黑色尼龍。這樣就可(kě)以依據內部繼電器、計數器、計(jì)時(shí)器、通(tōng)過電機的正反轉進(jìn)行控製,具體思路同上,考慮(lǜ)防止撞機等安全因素,完成上述要求的(de)程序設計,從(cóng)整體程序內摘錄部(bù)分程序。
部分程序
三、光機(jī)電一體實訓台結束語
根據實際動作要求,起初編寫的程序存在較多漏洞,經過多次在實驗台上進行測試,所設計程序完全(quán)可實現任務書的要求並達(dá)到最終實驗要求。在(zài)編程(chéng)調(diào)試程序時,實驗(yàn)台中涉及到氣缸控製,在線調試方法的靈活(huó)運用(yòng),步(bù)進電機、光電傳(chuán)感器、光纖傳(chuán)感器、光(guāng)纖放大(dà)器、三相異步電機、三菱變(biàn)頻(pín)調速器、三菱PLC主機的應(yīng)用,代表了自動化設備的生產模式,可推廣至各個領域,特(tè)別是自動(dòng)化(huà)生產線,在量產的今天不但可節(jiē)省用工成(chéng)本,而且可提高設(shè)備利用率,創造(zào)更高利潤。


 品牌理念
品牌理念  標準流程
標準流程  有效溝(gōu)通
有效溝(gōu)通 專業(yè)管理
專業(yè)管理 優秀團隊
優秀團隊 品質保證
品質保證 無憂售後
無憂售後 