平麵機構的組(zǔ)成要素及工作原理的設計(jì)方案
若組成機構的所有構件都在同一平麵或相互平行的平(píng)麵(miàn)內運動,則(zé)稱該機(jī)構為平麵機構。 機(jī)構是具有確定運動的構件係(xì)統,其組(zǔ)成要素有構件和運動副。所有構件的運(yùn)動平麵都相互平行的機構亦稱(chēng)為平麵機構,否則稱為空間機構(gòu)。
一、平麵機構的組成要素
1.構件及其類型
構件(jiàn)是機構彼此相對運動(dòng)的運動單元體。一個構件可以是一個單獨製造的零件(jiàn),如連杆;也(yě)可以是由若幹零件聯接構成的(de)組合體。
構件依(yī)其在機構中(zhōng)的功能分為機架、主(zhǔ)動件、聯運件和從(cóng)動件。機架是機構中相(xiàng)對靜止,支承各運動構件運動(dòng)的構件(jiàn);主動件又稱為原(yuán)動件(jiàn)或輸入件,是輸入運動和動力的構件;從動件又稱(chēng)為被動件或輸出件(jiàn),是直(zhí)接(jiē)完成機(jī)構運動要求,跟隨主動件運動的構件;聯運件是聯接主、從動(dòng)件的中介構件。
2.運動副
機構中各個構件之間必須有確定(dìng)的相對運動,因此,構件的連接既要使兩個構件直接接觸(chù),又能產生一定的相對運動,這種直(zhí)接接觸的活動連(lián)接(jiē)稱為運動副。軸承中的滾動體與內外圈的滾道,齧合(hé)中的一對齒廓、滑塊與導軌,均保持直接接觸,並能產生(shēng)一定的相(xiàng)對運動,因而都構成了運動(dòng)副(fù)。兩構件上直接參與接觸而構成運動副的(de)點、線(xiàn)或麵(miàn)稱為運動副元素。
3.運動鏈和機(jī)構
兩個以上的構件(jiàn)通過運動(dòng)副聯接而成的係統稱為運動鏈。運(yùn)動鏈分為(wéi)閉式運動鏈和開(kāi)式運動鏈兩種。所謂閉式運動(dòng)鏈是指(zhǐ)組成運動(dòng)鏈的每個構件至少包含兩個(gè)運動副,組成一個首末封閉(bì)的係統,開式運動鏈的構件中有的構件隻包含一個運動副,它們不能組成一個封閉的係統。
4.自由度和運動副約束
任何一個構件在空間自由運動時皆有六個自由度。它可表示為在直(zhí)角坐標係內沿著三個坐標(biāo)軸的移(yí)動和繞三個坐標軸的轉動。而對於一個作平(píng)麵運動的構件,則隻有三個自由度。即沿x軸(zhóu)和y軸移動,以及(jí)在xOy平麵內的(de)轉動。我們(men)把構件相對於參考係具有的獨(dú)立運動參數的數目稱為自(zì)由度。
兩個及兩個以上的構件通過運動副聯接以後(hòu),相對運動受到限(xiàn)製。運動副對成副的兩個構件間的相對運動所加的限(xiàn)製稱為約束。引入一個約束條(tiáo)件將減少一個自由度,而約束的多少及約束的特(tè)點取決於(yú)運動(dòng)副的形式。
(1) 轉動副的運動副限製了軸頸2沿x軸和y軸的移動,隻允許軸頸繞軸承相對轉(zhuǎn)動,這種運(yùn)動副稱為轉動副。轉動副引(yǐn)入了2個約束(shù),保(bǎo)留了1個自由度。
(2) 移動副的運動副(fù),構件這間隻能沿x軸作相對移動,這種沿一個方向相對移動的運動副稱為移(yí)動(dòng)副。移(yí)動副也具有2個約束,保留了1個(gè)自由度。
轉動副和(hé)移(yí)動副都是麵接(jiē)觸,統稱為低副。
(3) 平麵高副,在曲線構成的運動副(fù)中構件2相對於構件(jiàn)1既可沿接觸(chù)點處(chù)切線方向移動,又可繞接(jiē)觸(chù)點A轉動,運動副保留了(le)2個自由度,帶進了一(yī)個約束。這種點接觸或線接觸的運動副稱為高副(fù)。
二、平麵機構的工作原理
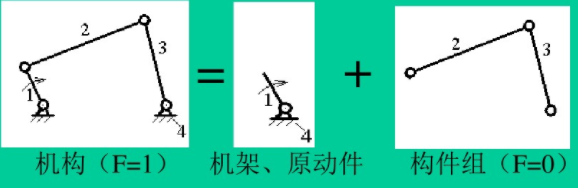
因為機構具有(yǒu)確定運動的條件:原動件數=F,所(suǒ)以如將機構的機架和原動件(稱為基(jī)本(běn)機構)與其餘構件拆分開,則(zé)由其餘構件構成的構件(jiàn)組的F=0。
而這個F=0的構件組,有時還(hái)可(kě)以再拆分成更簡單的F=0的構建組。
我們把最(zuì)後(hòu)不能再拆的(de)最簡單的自由度(dù)為0的構件組稱為基本杆組(zǔ)或阿蘇爾肝組,簡(jiǎn)稱為(wéi)杆組。
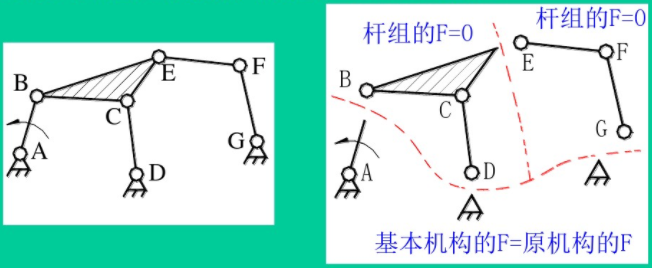
任何機(jī)構都可以看作是由若幹個基(jī)本杆組依(yī)次聯接到原動件和機架上而構成的。這就是所謂機(jī)構的組成原理。即:任何機(jī)構=原動件、機架(F個)+若幹個基本杆組(F=0)
三、平麵機構的設計方案(àn)

本裝置利用(yòng)各種給定的平麵機構,根據想象力搭接成一個完整的機械傳動方(fāng)案並進行機構運動的(de)測試(shì)分析,不僅可以培養學生的機構創意組合設計能力與數字化分(fèn)析能力,而且還可以培養工程(chéng)實踐能力。
1.實驗內(nèi)容
1)平麵機構創新設計:學(xué)生根據所學知識和實(shí)驗台提供的零件庫,設計平麵機構傳動方案。
2)平麵機構拚裝:學生可根據本實驗台(tái)提供的15種以上傳動方案或自己的設計方案進(jìn)行組裝。
3)平麵機構運動學(xué)測(cè)試及仿真實驗:學生(shēng)通過對自己設計的平麵機構進行測試(shì)分析、運動分析(xī)、實驗結果分(fèn)析。
4)虛擬三維(wéi)運動演示實驗
2.性能特點(diǎn)
1)工作台架采用雙麵操作(zuò)設計(jì),A麵用於測試分(fèn)析,B麵用於平(píng)麵機構設計和拚(pīn)裝實驗,美觀大方、適用性強(qiáng)、操作方便(biàn)。
2)所有杆(gǎn)構件長度及滑塊偏心距(jù)均可(kě)進行調節(jiē),分析該參數改變對機(jī)構運動特性的(de)影響。
3)該實驗台(tái)集平麵機構設計、拚裝、測試及性能分析(xī)與一(yī)體,培養學生綜合(hé)設計、創新能力、工程實踐能力、分析問題和解決問題的(de)能力。
4)實驗台框架及零部件采用優質鋼(gāng)材精工製造,零部件采用工業(yè)發藍處理,防鏽效果好。
3.主要技術參數
1)交流調速(sù)電機:120W 220V 0-200r/min
2)交流帶減速器(qì)電機:90W 220V 10r/min
3)測試傳感器:直(zhí)線位移傳感器:輸出電壓:0-5V 量(liàng)程:160L 1支
旋轉編碼器:輸(shū)出電壓:0~5V 脈衝數:1000P 2支
4)皮帶傳動 皮(pí)帶輪 4個皮帶O型×850L 2根
5)齒輪傳動
M=2 Z=80 2個
M=2 Z=90 2個
M=2 Z=36 1個
6)工(gōng)作(zuò)台外形尺寸:1200×800×800mm
7)操作台外形尺寸:1000×300×800mm
4.提供帶(dài)測試軟件的15種拚裝方案(àn)
1)曲柄滑塊偏心機構
2)曲柄(bǐng)滑塊對心機構
3)曲柄導杆偏心機構
4)曲柄導杆對心機構
5)曲柄(bǐng)導(dǎo)杆滑(huá)塊偏心機構
6)曲柄導杆滑塊對心機構
7)曲柄搖杆-齒輪齒條機構
8)曲柄(bǐng)搖杆機構(gòu)偏心(xīn)機構
9)曲柄搖杆對心機構(gòu)
10)曲柄導杆搖杆機構
11)雙曲柄搖杆機(jī)構
12)雙(shuāng)曲柄搖杆滑塊機構
13)正弦(xián)凸輪機構
14)簡振動凸輪機構
15)槽輪機構可以組合其他拚接機(jī)構
四、總(zǒng)結(jié)
機構的動力綜合最初是在剛體動力學(xué)範疇中進行(háng)的。通常(cháng)先按一般的運動綜合方法把機構設計出來,這樣得到的機構在工作速(sù)度較高(gāo)時,其動力性能常(cháng)不能達到設計要求,故應根據動(dòng)力學原理,通過改變質量配置或機構尺寸來獲得具有優良(liáng)動力性能的機構。60年代(dài)以來,由於機械向高速、重載、精密、尺寸小和重量輕發(fā)展,在機構綜合中必須考(kǎo)慮構件的彈性和運動(dòng)副的間隙等影響。如對(duì)於高(gāo)速印刷機的夾持(chí)機構(gòu),傳統的方法是把構件看作絕對剛體進行(háng)機構綜合,夾持機構全無(wú)夾持效能。在(zài)考慮到構件彈性而進(jìn)行動力綜合時(shí),其方法是:先根據(jù)給定運動要求,按剛性構件進(jìn)行(háng)機構運動綜合,再考慮構件的彈性進行機構的運(yùn)動(dòng)和動力分析。然後(hòu),將所得動力性能數據與理想的動力性能數據比較,如動力性能誤差超過允差,就加以修正和進行再綜合,這樣反複進行,直到滿足要求為(wéi)止。


 品牌理念
品牌理念  標準流程
標準流程  有效溝通
有效溝通 專業(yè)管理
專業(yè)管理 優秀團隊
優秀團隊 品質保證
品質保證 無憂(yōu)售後
無憂(yōu)售後 