

工業(yè)機(jī)器人視覺識別應用實訓平台,機器人視覺識別應用實訓係統,工
2020-09-29 09:06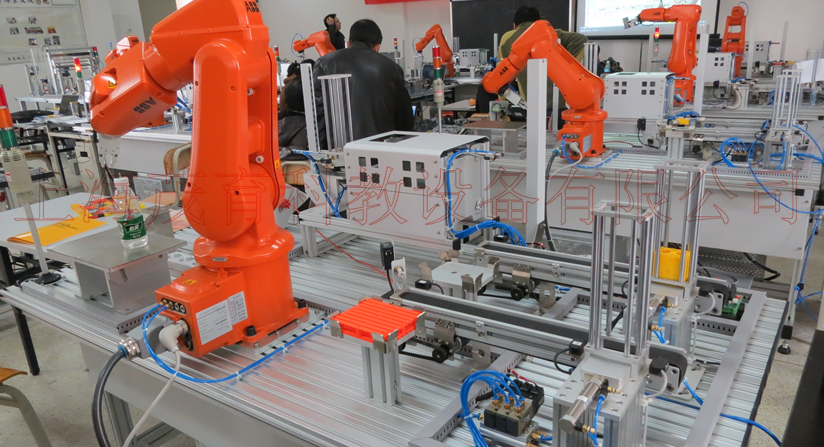
平台以工業機器人與機器視覺為核(hé)心,將機械、氣動(dòng)、運動控(kòng)製、電(diàn)氣控製、伺服驅動、變頻調速、傳感檢測、條碼或二維碼讀取、RFID讀取、編碼器(qì)技術(shù)、PLC控製技(jì)術有機(jī)地(dì)進行整合(hé),結構模塊化,便於(yú)組合,實(shí)現對高速(sù)傳輸線上的不同物料進行快速的檢測、組裝。為了方便實訓教學,係統進行了專門的設計,可以(yǐ)完成各(gè)類機器人單項訓練和(hé)綜合(hé)性(xìng)項目(mù)訓練(liàn),可完成各類(lèi)機器人單項訓練和綜合性項目(mù)訓練。可以進行六軸(zhóu)機器人示教(jiāo)、定(dìng)位、抓取、裝配、物流等訓練,可(kě)以在(zài)此基礎上進行產(chǎn)品柔性包裝、零件組裝、激光焊接、三維檢測(cè)、點膠、鎖螺絲等實際工業應用項目。
二、工業(yè)機器人視覺識別應用實訓平(píng)台,機(jī)器人視(shì)覺識別應用(yòng)實訓係統,工業機器人視覺識別應用實訓裝置的結構和工作過程
在鋁合金導軌式實訓台(tái)上安裝大工件出料(liào)裝置、伺服搬運機械手(shǒu)、模擬衝床加工、小工(gōng)件給料裝配、自動傳送分(fèn)揀(jiǎn)、6自由(yóu)度工業機械手搬運、智能倉儲入(rù)庫等工作站(zhàn),構成(chéng)一個典型的機電一體化設備的(de)機械平(píng)台;電氣控製采(cǎi)用(yòng)RS485串行通訊方式實現分布式的(de)控製,從而組成(chéng)自動加工、裝配生產線,真(zhēn)實呈(chéng)現自動生產線的柔性加工過程(chéng)。
各工作站的結構和功能如(rú)下:
⑴ 供料站
供料站主要由料倉及料槽、推料氣(qì)缸和物料台以及相應的傳感器、電(diàn)磁閥(fá)構成。
本(běn)站(zhàn)工作過程如下:係統啟動後,推料氣缸推出,把(bǎ)料槽中最底層的工件推到物料台上工(gōng)件抓取位。工件到(dào)位傳感器檢測到工件到位後,推出氣缸氣缸縮回。搬(bān)運站機械手伸出並抓(zhuā)取該工件,並將其運送往加工(gōng)站。
⑵加工站
加工站(zhàn)主要由物料台、夾緊機械手、物料台伸出(chū)/縮回(huí)氣(qì)缸、加工(衝壓(yā))氣缸以及相應的傳感器、電磁閥構成。
本站的(de)功能是完成一個對工件(jiàn)的衝壓加工過程(chéng),流程如下:
搬運站機械手把工件運送(sòng)到物料台上→機械手指夾緊工件→物料台回到(dào)加工區域衝壓氣缸(gāng)的下方→衝壓氣缸向下伸出衝壓工件→完成衝壓動作後向上縮回→衝壓氣缸縮回到位→物(wù)料台重新伸出→到位後機械手指鬆開→搬運站機(jī)械手伸出並夾緊工件,將其運送往裝配站。
⑶裝配站
裝(zhuāng)配站(zhàn)主要有供料單元、吸盤(pán)式裝配單元、放料台(tái)以及相應的傳感器、電磁閥構成。
本站功能是完成裝配工序,即把黑色或(huò)白色(sè)兩種小圓柱工件嵌入到大工件中的裝配過程。
當搬運站(zhàn)的機械手把工件運送到裝配站(zhàn)物料(liào)台上時,推料氣缸伸出,使料(liào)槽中最底(dǐ)層(céng)的小圓柱工件落到旋轉供料台上(shàng),然後吸盤式(shì)裝配機構伸出吸盤→抓取小圓柱→手爪提(tí)升→手臂(bì)伸出→手爪下降→手爪鬆開的動作順(shùn)序,把小園柱工件順利裝入(rù)大工件中,搬運站機械手伸出並抓取該工件,並將其(qí)運送往物料分解站。
⑷分揀站
分(fèn)揀站(zhàn)主要有傳送帶、變頻器、三相電機、推料氣缸、電磁閥和定位光(guāng)電傳感(gǎn)器及區分黑白(bái)兩種顏色的光纖傳(chuán)感器構成。
本站的功能是完(wán)成從裝配站送來的裝配好的工件進行分揀。當搬運(yùn)站送來工件放到傳送帶上並為入料口光電傳感器檢測到時,即啟動變頻器,工件開始送入分揀區(qū),如果進入分揀區工件為金屬,由檢測(cè)金屬的電感式傳感器作為1號(hào)槽推料氣缸(gāng)啟動信號,將黑色料推到1號槽(cáo)裏;如果進入分揀區(qū)工件為白(bái)色,則由檢測白色物料的(de)光纖傳感器動(dòng)作,作為2號(hào)槽推料氣(qì)缸啟動信號,將白色料推到2號槽裏,如(rú)果進入分揀區工件為黑色,由檢測黑色的光纖(xiān)傳感器作為(wéi)3號槽推料氣缸啟動信號,將黑色料(liào)推(tuī)到3號槽裏。。自動生產線的加工結束(shù)。
⑸伺服輸(shū)送機構
伺服輸送機構主要有伺服電機、伺服電(diàn)機驅(qū)動器、同步帶式線性導軌、四自由(yóu)度搬運機械手、電磁閥和原點定位(wèi)開關構成。
本(běn)站的功能是完成向(xiàng)各個(gè)工作單(dān)元輸送工件,係統分為四自由度抓取機械手(shǒu)單元和直線位移位置精確控製單元兩部(bù)分,係統上電後,先執行回原點操作,當到(dào)達原點位置後,若係統(tǒng)啟動,供料站物料台檢測傳感器檢測到有工件時,機械手整體先提升到位後手爪伸出到位後手爪夾緊,手爪夾緊到位手爪(zhǎo)開(kāi)始(shǐ)縮會機械手整體下將到位後,步進(jìn)電機開始工作按(àn)設定好的脈衝量(liàng)到加工站。加(jiā)工站到位後機械手整體提升,提升到位後手爪伸出伸(shēn)出到位後機械手整體(tǐ)下降,下降到位後工件已(yǐ)放入加工站物料台上,然後手爪鬆開(kāi),鬆開到位(wèi)後機械手回縮,等加工站加工完成後再將工件送到裝配站和分揀站完成整個自動生產線加工過程。
(6)6自由度工業機械手搬運
由6自由度工業機(jī)械(xiè)手本體(RV-2F-1D-S11)、工業機械手驅動器(qì)(CR751-D)、抓(zhuā)手輸入輸(shū)出電(diàn)纜、I/O通訊模塊、控製電纜、示教器(qì)、夾緊機械手(shǒu)相應的傳感器、電磁閥構成。六軸機器人對經過(guò)檢測分揀(jiǎn)單元檢測合格的工件進行搬運,搬運到智能倉庫單元供入庫。
(7)智能立體倉庫(kù)
立體倉庫裝置為(wéi)四層十六倉位庫體,主(zhǔ)要由機械部件、電氣控製部件及上(shàng)位機組態三部(bù)分組成。具(jù)備三維運(yùn)動控製(zhì)功能(X、Z軸完成倉位定位、Y軸完成物(wù)料放入與取出);
機械部件為可拆裝(zhuāng)式模塊化結構,由底板(由工業組合型鋁型材組成)、庫體(全鋁(lǚ)結構)、垛手(全(quán)鋁結構)、蝸輪傳動部件、滾(gǔn)珠(zhū)絲杠、光杠、異型鋁材(cái)、氣缸、手指及按鈕角板等部分(fèn)組成;
電氣部件由西門子PLC(CPU226 DC/DC/DC,也可選配其它常用PLC)、步進電機、步進電機驅(qū)動器(qì)、單相漏電保護器、熔斷器、開關(guān)電源、繼電器、電感式接近開關、微型光電開關、行程開關(guān)、按鈕、工程拖鏈及集成電纜接線係統等部分組成;
觸摸屏組態監控(kòng)使用MCGSTPC7062型觸摸(mō)屏,在上位機上可進行各種功(gōng)能設定及選擇,並能實時監控倉庫的狀態並可(kě)對其進行控(kòng)製。
三、工(gōng)業機器人視覺識別(bié)應用實訓(xùn)平台,機器人視(shì)覺識別應用實訓係(xì)統,工業機器人視覺識別應用實訓裝置係統控製方案
根據機械平台的上述工藝過程, 采用RS485串行通訊方式(shì)實現分布式的控製係統(tǒng)。
采用RS-485總線(xiàn)的PLC互(hù)連網絡。
采用了觸摸屏人機界麵,而(ér)每種通訊網絡又按所選用不(bú)同的主流PLC廠家而有不同的配置,分述如下:
1、采(cǎi)用(yòng)RS-485總(zǒng)線的PLC互連(lián)網絡的控(kòng)製方案
本控製方(fāng)案的目標,是使學生通過實(shí)訓(xùn),掌握RS-485通訊技術和采用廣播方式實現PLC之間交換信息的(de)PLC互連(lián)技術。作為PLC通訊網絡的基本技術,並鑒於采用RS-485總線的(de)PLC互連網絡廣泛用於小(xiǎo)型集散控製係統上,熟練掌握這一技能,是高職學生必不可少的。
本裝備分別有西門子(zǐ)S7-200係列,三菱(líng)FX2N係列的(de)PLC配置,用戶也可選擇其它(tā)廠(chǎng)家的控製器係統。
1)西門子S7-200係列(liè)
本方案采用PPI(點對點接口)協議實現通訊,以觸摸屏(TPC7062)和搬運站PLC(S7-226)為智能倉庫站(zhàn)控製係統.
2)三菱FX2N係列:
本方案采用(yòng)FX2N 的(de)N:N通訊網(wǎng)絡。各工(gōng)作站均插上FX2N-485-BD通訊板,以(yǐ)搬運站PLC(FX2N-48MT)為(wéi)主站,其(qí)餘各站為從站構成N:N通(tōng)訊網絡。觸摸屏連接到主站(zhàn)編程口上,分揀站的FR-D700變(biàn)頻器也作為第5# 從站(zhàn)連接到網絡上。同時安裝(zhuāng)有伺服控製器用的定位模塊,各站PLC的型號見配置清單。
四、工業機器人視覺識別應(yīng)用實訓平台,機(jī)器(qì)人視覺識別應用實訓係統(tǒng),工(gōng)業機器人視覺識別(bié)應用實訓裝置本(běn)裝備的特點:
1、有(yǒu)機融合了機械技(jì)術(包括氣動技術)、傳感器技術、交流電動機(jī)變頻調速和步進電機驅動(dòng)控製、伺服電機控製(zhì)技術、工業機器人控(kòng)製技術、觸摸屏技術、PLC控製及通信網絡等技術,體現了現(xiàn)代製(zhì)造業生產過程的特征。
2、整體結構采(cǎi)用開(kāi)放式和拆裝式,能方便地更換模塊,按具有生產性功能和整合學習功能的原則確定模塊內容,使教學或競賽時可方便的選(xuǎn)擇需要的模塊。
3、用於教學,可按工作過程導向,工學結合的模式規劃教學活動(dòng),完成以下工作任務:
1)氣動係(xì)統的安(ān)裝與調(diào)試(shì)項目:
選用(yòng)該(gāi)裝備(bèi)配置的(de)單出杆氣缸、單出雙杆氣缸、旋轉(zhuǎn)氣缸等氣動執行元件和單控電(diàn)磁換(huàn)向閥、雙控電磁換(huàn)向閥和磁性開關等氣動(dòng)控(kòng)製元件,可完成下列氣動技術的工作任務(wù):
氣動方向控製回路的安裝;氣動速度控(kòng)製回路的安裝;擺動控製回路的安裝;氣動順序(xù)控(kòng)製回(huí)路的安裝;氣動機械手裝置的安(ān)裝;氣動係統安裝與(yǔ)調試;
2)電氣控製(zhì)電路的安(ān)裝(zhuāng)和PLC程序編(biān)寫項目:
選(xuǎn)用該裝置配置的PLC模塊、交電機變頻器模(mó)塊、伺服電機控(kòng)製模塊、步進電機驅動模塊、傳感器(qì)等,可完成下列PLC應用技術工作任務:
電動機控製電路的連接(jiē)與控製(zhì)程序編寫;電動機調速控製電(diàn)路的連接與控製程序編寫;步進電機控製電路(lù)的連接與控(kòng)製程序編寫;伺服電機控製電路的連接與控製程序編寫;氣動方向控製程(chéng)序(xù)編寫;氣動順序動作控製程序編(biān)寫;氣動機械手(shǒu)控製程序編寫;皮帶輸送機控製程序編寫;機電(diàn)一體化設備(bèi)控製程序編寫;自動生產(chǎn)線控(kòng)製程序(xù)編(biān)寫。
工業(yè)機械手的控製:機(jī)械手多速度段運行控製、啟動與製動變速實(shí)訓、多點定位控製、機器人原點與複位、機器人單步與連續控製、多(duō)細分度與脈衝實訓、 網絡IO監控機器人工作狀態等控製程序的編寫。
3)PLC通訊網絡的安裝、程序編(biān)製及調試:
4)機電設備安裝與調試項目
選用該裝置配置的機電一體化設備部件、PLC模塊、變頻器模塊和指令開關、傳感器等,可完成下列機(jī)電設備安裝和機電一體化技(jì)術的工作任務:
傳動裝置同軸度的調整;皮帶輸送機的安裝與(yǔ)調整;搬(bān)運機械手設(shè)備安裝(zhuāng)與調(diào)試;物件分揀設備的安裝與調試;送料設備的安裝與調試(shì);自動生產線設備安裝與調試。
4、本裝備用於考核或技(jì)能競賽,可考察的職業能力:
機械構(gòu)件的裝配與調整能力;機(jī)電設備(bèi)的安裝與調試能力;電路安(ān)裝能(néng)力;氣動係統的(de)安裝(zhuāng)與調試能力;機電一體化設備的控製程序的編寫能力;自動控製係統的安裝(zhuāng)與(yǔ)調試能力。PLC網絡的安裝、編(biān)程與調試能力(lì)。
該實訓考核裝置主站PLC模塊的I/O 端子、變頻器的接線端子、各常用模塊與(yǔ)PLC的連接端子,均與安全插座連接,使用帶安全(quán)插頭(tóu)的導線進行電路連接;各指令開關、光電開關、傳感器和指示元件的電路,則(zé)通過端子排進行連接。插拔線連接電路與端子排連(lián)接電路相結合(hé),既保證學生基本技能的訓練、形成和鞏固(gù),又保證電路連(lián)接的快速、安全和可靠。







