

三維機構創新綜合實驗台,三維機構創新實驗裝置,三維機(jī)構(gòu)實訓台
2025-11-16 10:34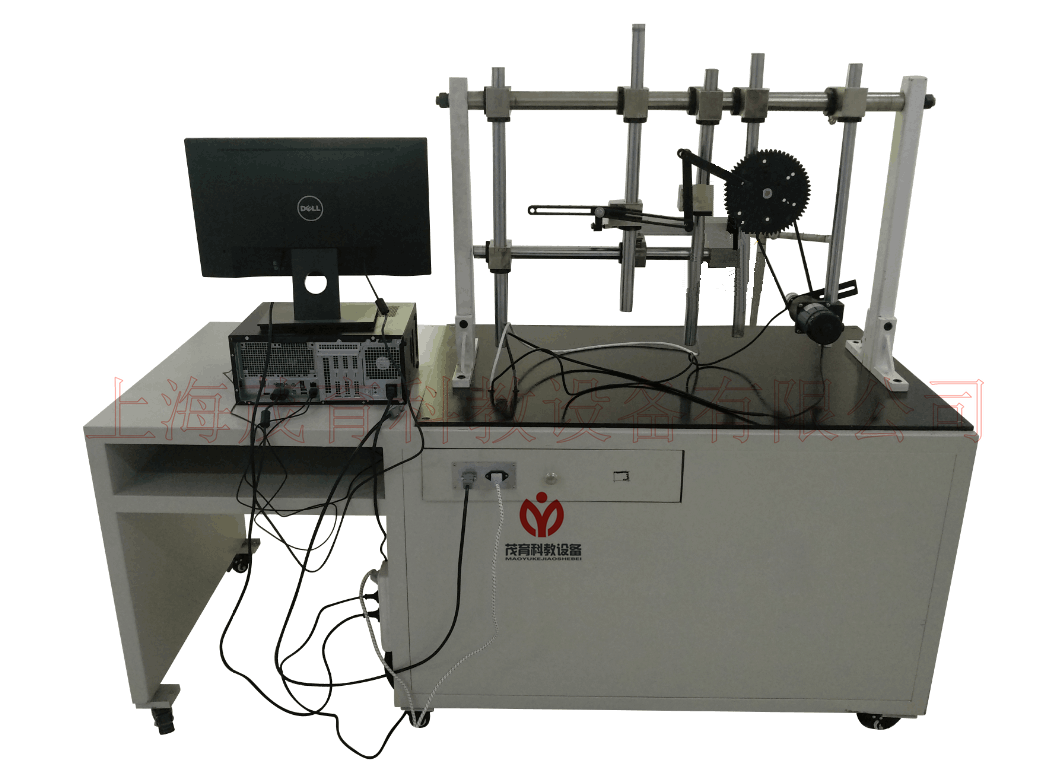
三維機構係統能實現任意方(fāng)向(xiàng)的傳動、任意形式的運動、任意位置的變換,在(zài)現代機械係統中得到越來越廣泛地應(yīng)用。因此,工科類大專院校要實現創新教育,在機類的《機械原理》和非機類的《機(jī)械設計基礎》課(kè)程教學將要結束時,讓學生進行三維機構係統(tǒng)創(chuàng)新綜合(hé)實驗是必不可少的。
該實驗台的功能主要是(shì)為學生提供了手動拚裝(zhuāng)三維(包括二維)機構係統的實訓平台,讓學(xué)生設計並(bìng)拚裝(zhuāng)可實現(xiàn)不同運動要求的三維機構傳動係(xì)統。同時實驗台在主要構件上設計了安裝傳(chuán)感器(qì)的位置,並配備了檢測係統和數據處理軟件,學生可通過運動參數變化曲(qǔ)線,了解不同機構運動構(gòu)件的運動規(guī)律和運動學、動力學特點。
二、主要技(jì)術參數:
1、供電(diàn)電源:220V/50HZ;
2、直流電機功率:245W;
3、電機轉速可調:0—200r/min;
4、直線位移傳感器(2個):量程160mm;
5、角位移傳感器(qì)(2個):脈衝數500;
6、外(wài)型尺寸:1200×600×14500mm;
三、性能特點:
1、可拚裝(zhuāng)實(shí)現任意傳動方向、任意運動(dòng)形式、任意位置變換的三維(包括二維)機構係統。
2、可拚裝二維和三維的機(jī)構係統多達60種以上;其中,許多典型拚裝(zhuāng)方案(àn)與實際相符,如:V型發動機、汽車後橋驅動係統、衝床自動換位機構、空間球鉸機構等。
3、所有杆構件長度及滑塊偏心距均(jun1)可進行無級調節,分析該參數改變,對機構運動(dòng)特性的影響。
4、檢測係(xì)統(tǒng)集數據采集(jí)與電機調節控製於一體。檢測係統采用先進的AVR係列單片機係統,以(yǐ)串口通訊,測試數據精度高、速度快、穩定。
5、該係統配套(tào)軟件以(yǐ)Vb為平台製作開發,其內容豐富,包括實驗台介紹、平麵機構虛擬設計、平麵機構的虛擬運動、機構運動檢測、平麵機(jī)構運動仿真、實驗結果分析等內容,具有綜合性、開放性的特點。
6、軟件(jiàn)說明(míng):該(gāi)軟件由兩部分,一部分為拚裝方案的仿真(zhēn)軟件,裏麵包括:
1)實(shí)驗台所有零部件的三維實體圖、
2)12種運動副拚裝方案、
3)14種工(gōng)程機(jī)械原理拚裝方案、
4)21種平麵機構運動仿(fǎng)真動畫、
5)9種三維機構(gòu)運動仿真動畫、
6)拆卸分解過程爆炸演示。
另一部分為機構(gòu)運動仿真、機構設計仿真、數據采集仿真及實際數據采集係(xì)統,裏麵包括平麵機構、凸輪機構(gòu)、間歇機構(gòu)等三類(lèi),共計12種典型(xíng)機構運動分析、設計(jì)及仿真。在該部分學生既可自行設計或修改各(gè)種機構中的所有(yǒu)零部件參數,進而觀察期運動情況,模擬采集運動(dòng)曲線等。又可以利用實驗(yàn)台搭接成實際的機構運動方案,對各部件的實際運動情況進行數據采集。比較理(lǐ)想狀態(tài)與實際情況的運行差異(yì),使學生更加深刻的掌握所學(xué)的(de)知識。
7、驅動(dòng)直流電機可進行無級調(diào)速,以滿足實驗機構的不同運動要求。
8、實驗台采用下拉式(shì)控製麵板、液(yè)晶顯示,顯示(shì)數據穩定(dìng)、可(kě)靠。
9、計算機全程控(kòng)製(全自動)或手動控(kòng)製設備的啟停、加減速(sù)、數據采集(jí),實時顯(xiǎn)示運(yùn)動參數和變化曲線,數據可生成(chéng)EXCEL表格、可保存、打印、遠程轉輸等。
四、22條典型(xíng)傳動路線,在典型(xíng)傳動上加以變化,能拚裝(zhuāng)的(de)機構不少於60種
傳動路一 (汽車後橋驅動係統)輪係1:動力源→齒輪(lún)傳(chuán)動→兩級單萬向節→後橋差動輪係。
傳動路(lù)線二 輪係2 電動機--主帶(dài)輪-皮帶-從(cóng)動帶輪(lún)-級齒輪(lún)傳動-二級齒輪(lún)傳動(dòng)-斜齒輪傳動。
傳動路線三 輪係3 一級齒輪傳動-二級齒輪傳動-螺旋齒輪傳動(dòng)。
傳(chuán)動路線四:動力源→圓錐齒輪→蝸輪蝸(wō)杆→凸輪連杆組合。
傳動路線五(V型發動機):動力源→齒輪傳動→曲柄滑塊(kuài)(2個)。
傳動路線六(並聯機構):動(dòng)力源→齒輪傳動→曲(qǔ)柄滑塊→齒(chǐ)輪齒條(滑塊)→螺旋齒輪
→曲柄(bǐng)搖(yáo)杆→棘輪機構。
傳動路線七:動力源→凸輪機構→齒輪齒條(推杆(gǎn))。
傳(chuán)動路線八:動力源→齒輪機構→曲柄(bǐng)導杆滑塊。
傳動路線九:動力源→曲柄搖杆→棘輪機構。
傳動路線十:動力源→齒輪機(jī)構→曲柄搖杆機構。
傳動路線十一:動力源→齒輪機構→錐齒輪→曲柄搖(yáo)杆→棘輪機構。
傳動路線十二:動力源→齒(chǐ)輪機構→曲柄搖杆→棘輪機構。
傳動路線(xiàn)十三:動(dòng)力源→齒輪機構→曲柄(bǐng)滑塊→齒輪齒條。
傳動路(lù)線(xiàn)十四:動力源→凸(tū)輪連杆組合機(jī)構。
傳動路線(xiàn)十(shí)五(衝床自動換(huàn)位(wèi)機構):動力源→齒輪傳動→錐齒輪傳動(dòng)→球麵槽輪機構。
傳(chuán)動路線十六(空間球鉸機構):動力源→鏈傳動→錐齒輪(lún)機構→空間球鉸機構→齒輪機構。
傳動路線十七(qī):動力源→平麵槽輪機構。
傳動路線十八:動力源→不(bú)完全齒輪機構。
傳動路線十九:動力源→非圓齒輪機(jī)構。
傳動路線二十:動(dòng)力源→換向機構→齒輪齒(chǐ)條。
傳動路線二十一(yī):動力源→插(chā)齒機機構。
傳動路線二十(shí)二(正(zhèng)餘弦函數(shù)):動力源→曲柄移動(dòng)導杆機構。







